Research
We are broadly interested in the relationship between form, function and ecology of living and extinct animals with a specific interest in the different ways that movement limits evolutionary pathways. At the moment we are asking questions about why the kangaroo evolved such an efficient hop, why invasive species outcompete Australian natives, and the link between habitat and lizard morphology.
Our methods are as varied as the range of species we study:
- High-speed kinematics tracking to track stride and postural changes
- Bio-inspired robotics to explore the boundaries of morphology
- Predictive musculoskeletal simulations to study what can’t be captured in the lab
- Drones and high-speed cameras to capture kinematic footage
- Custom, modular, multi-sensor biologging collars to track fine-scale activity and movement in the wild
- Machine learning to predict fine-scale behaviours from accelerometer data
Each of these methods has a place in answering the fundamental questions about the pathway and limitations of evolution, why animals move in the way they do, and why they live where they live.

Main research fields:
Bio-inspired Robotics
Explore the adaptive landscape by experimenting with the morphology of climbing and jumping robots.
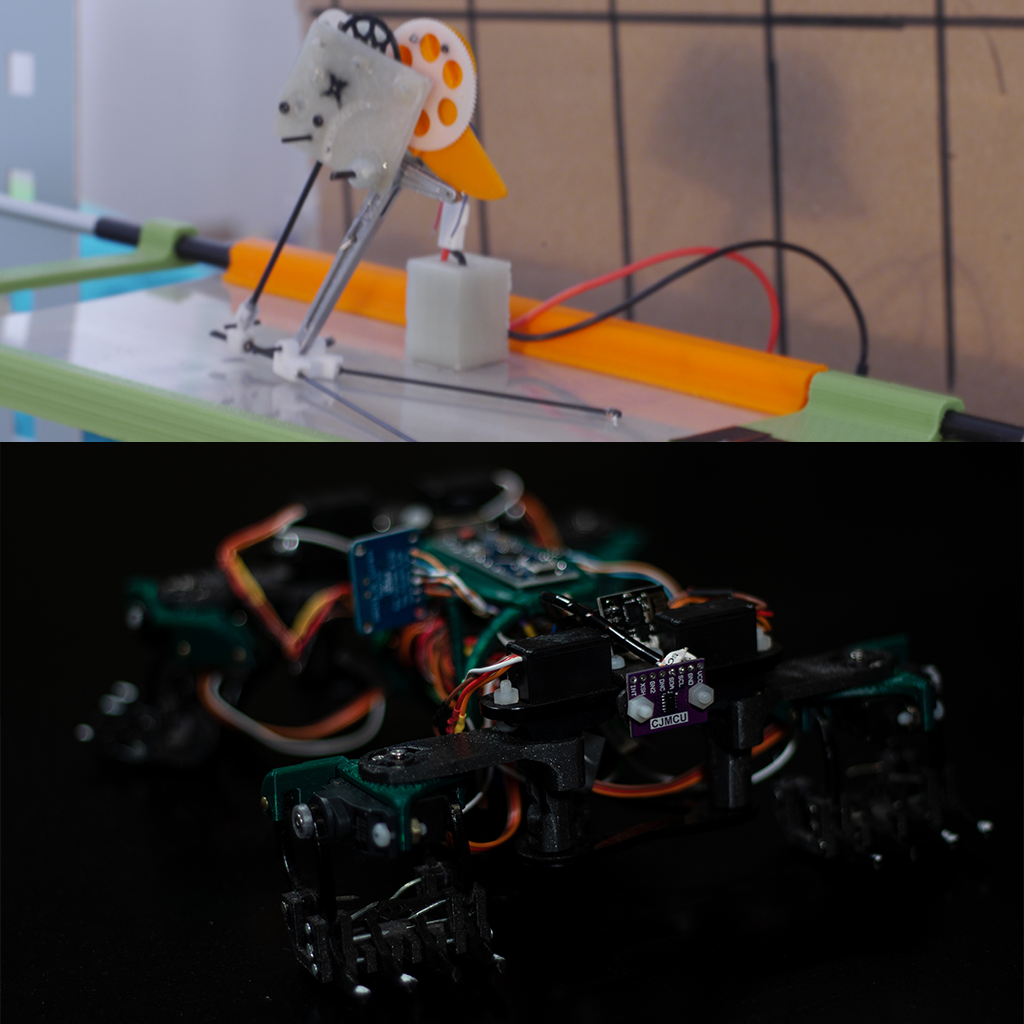
Every species alive today has adapted to its environment, while unsuccessful species have gone extinct but to understand biomechanical success, we need to study both the winners and losers. Varying the morphology of bio-inspired robots allows us to explore successful trait combinations and biological constraints. We’ve designed 6 generations of morphologically variable climbing robots and are now developing a kangaroo-inspired hopping robot to experiment with locomotory efficiency.
Computational Biomechanics
Combine muscle physiology and biomechanics in virtual computational models to map complex changes in the adaptive landscape.

Size is a key evolutionary constraint, influencing everything from cellular functions to an animal’s ability to move. To fully understand how size impacts performance we construct predictive, physics-based musculoskeletal models. CT scans of bones and soft tissues construct 3D musculoskeletal models, which, animated by 3D motion capture, allow us to recreate exact biomechanics throughout a stride. Our simulations are as big or small, fast or slow, as we program them to, allowing us to explore every edge of the possible evolutionary landscape.
AI-assisted Animal Tracking
Using accelerometers and machine learning to remotely study animal behaviour.

Animals behave differently in the lab compared to their natural habitats. To study their natural behaviour, we use custom-designed multi-sensor biologging collars that enables us to reconstruct exact-path GPS tracks and predict specific fine-scale behaviours from free-roaming wild animals—without needing to follow them with binoculars. When combined with habitat data, this creates a detailed spatiotemporal map of where, when, and what animals are doing. We’ve used these collars on nearly a dozen different species to learn about their ecology.
Current Projects:
Biomechanics and Behaviour of Juvenile Joeys
They grow up so fast…

From their first hops to saying goodbye to mama, we’re using biologging collars, machine learning, and high-speed kinematics to follow kangaroo joeys through their juvenile growth phase to understand their changing biomechanics and behaviour.
Roo-bot
The future of robot locomotion only needs one leg.
Contrary to every other animal on earth, the faster the kangaroo moves, the more energy efficient it becomes. How can this be, and how can we harness that ability? In collaboration with ARIA, Robin is designing an ultra-energy-efficient robot kangaroo to mimic the hopper’s unique stride.
Savannah vs Outback
Kangaroos and Antelope: same, same, but different?

The interiors of Australia and Africa are difficult places to survive in which kangaroos and antelope share some of the same niche. We use our biologging collars to track and compare 4 species of kangaroos and 2 species of antelope.
6th Generation Climbing Robot
Now with wrists and shoulders!

As part of his 4 month internship, Jonah constructed a lizard robot with movable wrists and shoulders capable of climbing up concave and convex surfaces. The next step is to compare the robot to real geckos and see how their gait differs.
Weight-bearing Simulations
The impact of pregnancy on mum’s biomechanics and energy expenditure.

Have you ever seen a marsupial mum with a pouch-young almost as big as them? We use musculoskeletal models to understand how macropod mums are still able to hop and compare this to human pregnancy models.
And so much more!
- Automated machine learning workflows
- Size and morphology varying kangaroo models
- VHF-enabled tranquilization darts
- Stride length and frequency between kangaroo species using kinematic tracking
- Perentie lizard GPS tracking in outback Australia
- Jellyfish biomechanics
Want to collaborate or launch a new idea?